Датчики для считывания сигналов головного мозга работают на основе регистрации электрических импульсов, которые возникают в нейронах. Основные технологии, используемые в таких устройствах, включают электроэнцефалографию (ЭЭГ), которая фиксирует действия нейронов с помощью электродов, размещенных на поверхности кожи головы. Эти электрические сигналы затем усиливаются и обрабатываются, чтобы предоставить информацию о состоянии мозга и его активности.
После получения данных, специальное программное обеспечение анализирует сигналы и преобразует их в читаемую форму. Это позволяет исследователям и врачам отслеживать различные состояния, такие как уровень стресса, концентрацию или даже симптомы определённых состояний, таких как эпилепсия. Использование таких технологий открывает новые горизонты в области нейронауки и медицинской диагностики.
- Датчики для считывания сигналов головного мозга преобразуют электрические импульсы нейронов в цифровые данные.
- Наиболее распространённые типы датчиков — это электроэнцефалографы (ЭЭГ), которые фиксируют изменения электрической активности через electrodes на поверхности кожи головы.
- Современные разработки включают инвазивные и неинвазивные технологии, каждая из которых имеет свои преимущества и недостатки.
- Сигналы, полученные от датчиков, обрабатываются с помощью алгоритмов машинного обучения для анализа и интерпретации нейронной активности.
- Такие технологии находят применение в медицине, нейропсихологии и интерфейсах «мозг-компьютер».
Устройство и принцип работы электроэнцефалографа
Электроэнцефалограф представляет собой прибор с множеством каналов, предназначенный для безболезненной диагностики и проведения высокоинформативных исследований. Он способен фиксировать электрические биопотенциалы, которые характеризуют функциональную активность мозга. В результате его работы получается так называемая электроэнцефалограмма. Точность получаемых данных зависит от выбора типа и качества используемого оборудования. В данной статье мы проанализируем основные характеристики и особенности данного устройства.
В головном мозге человека непрерывно происходят химические и физические процессы. Это находит отражение в различных электрических колебаниях — альфа-, бета-, гамма-, тета- и дельта-ритмах, амплитуда и частота которых зависят от внешних факторов и индивидуальных особенностей функционирования мозга. Прибор считывает эти электрические волны через соответствующее количество электродов, установленных на голове пациента, и отображает их на бумаге или на экране. Далее данные интерпретирует специалист, который ставит диагноз.
Назначение и применение электроэнцефалографа
Такое оборудование активно используется в различных медицинских областях: неврологии, нейрохирургии, психиатрии, реанимации, а В функциональной диагностике. В научной среде оно применяется в нейрофизиологии и психофизиологии. По результатам работы аппарата производится запись амплитудно-частотных характеристик электрической активности мозга, которые активно используют для диагностики эпилепсии, последствий черепно-мозговых травм, сосудистых заболеваний мозга и других патологий, а также для оценки эффективности проводимого лечения.
Представленное на рынке оборудование оптимизировано для решения определенных задач. Приборы принято классифицировать следующим образом:
- Портативные. Это небольшие устройства, обладающие необходимыми функциями для мобильных медицинских групп. Они работают на аккумуляторах и удобны для экстренного применения.
- Стационарные. Такие устройства подключаются к электросети, используются в лечебных учреждениях и обеспечивают высококачественные клинические записи.
- Бумажные. Данные в них распечатываются на специальной бумажной ленте.
- Цифровые. В этом случае информация выводится на дисплей и одновременно сохраняется в памяти компьютера.
Датчики для считывания сигналов головного мозга работают на основе регистрации электрических импульсов, возникающих в нейронах. Эти импульсы передаются по нервным клеткам и создают электрические поля, которые можно обнаружить на поверхности кожи головы с помощью электроэнцефалографии (ЭЭГ). Современные устройства используют множество электродов для повышения точности и разрешающей способности, позволяя получать более детализированные и информативные данные о нейронной активности.
Процесс считывания сигналов осуществляется с помощью сенсоров, которые фиксируют изменения электрического потенциала в мозговых структурах. Эти сигналы затем усиливаются и обрабатываются специальным программным обеспечением, которое анализирует паттерны активности. Важной задачей этого программного обеспечения является фильтрация помех и шумов, что позволяет выделить сигналы, непосредственно связанные с когнитивной активностью, например, процессами внимания, памяти или эмоций.
Некоторые современные системы также используют методы машинного обучения для улучшения точности интерпретации данных. Они могут распознавать конкретные шаблоны мозговой активности и предсказывать состояния или намерения пользователя. Это открывает новые горизонты не только в neuroscience, но также в разработке технологий для взаимодействия человека с компьютером, создания интерфейсов для управления устройствами с помощью мыслей и даже в лечебной практике для реабилитации пациентов с неврологическими нарушениями.
Управление мобильным роботом посредством сигналов головного мозга
В этой статье рассматриваются возможности использования нейрокомпьютерного интерфейса NeuroSky Mindwave Mobile для управления мобильным роботом. Проведенное исследование показывает, что данный интерфейс в состоянии фиксировать специфические мозговые сигналы, которые могут быть использованы для контроля перемещения робота, хотя набор этих сигналов ограничен. Таким образом, нейрокомпьютерный интерфейс NeuroSky MindWave Mobile может применяться для управления различными роботами для выполнения ряда определенных действий.
Последние достижения в области ЭЭГ (электроэнцефалография) открыли широкие возможности для исследований и разработки приложений по использованию данных сигналов головного мозга в различных предметных областях. Традиционно, данные ЭЭГ получали с помощью громоздких медицинских устройств путем установки инвазивных датчиков непосредственно в мозг под черепом, либо, используя, мокрые электроды, обрабатываемые специальным гелем. В настоящий момент на рынке появились устройства нескольких производителей, которые позволяют собирать данные ЭЭГ с помощью неинвазивных сухих электродов. Данные устройства от ЭЭГ устройств медицинского класса отличает компактность, удобство использования в повседневной жизни, а также значительно более низкая цена. Примерами таких устройств являются продукты компаний NeuroSky, MindFlex, Emotiv.
С учетом растущей доступности подобных технологий, важным становится исследование и оценка их применения обычными пользователями в не лабораторных условиях для научных и практических целей. В этой статье мы обсудим перспективы использования коммерческих нейрокомпьютерных интерфейсов для управления мобильными роботами. Мы проанализировали и оценили возможности применения различных мозговых сигналов, которые регистрируются нейрокомпьютерным интерфейсом NeuroSky MindWave Mobile (Рис. 1б) для контроля движения мобильного робота Orbotix Sphero (Рис. 1а).

Рис. 1. Устройства, задействованные в эксперименте: а — мобильный робот Orbotix Sphero; б — нейрокомпьютерный интерфейс NeuroSky MindWave Mobile

Наша работа отличается от прежних исследований, сосредоточенных на управлении устройствами и системами с использованием ЭЭГ, тем, что мы исследуем применение одноканального ЭЭГ сигнала, а не многоканальных. Сегодня клинические ЭЭГ-системы оснащены множеством электродов (32, 64, 128, 256), обеспечивая многоканальную запись сигналов. В нашем эксперименте был использован одноканальный коммерческий нейрокомпьютерный интерфейс NeuroSky MindWave Mobile, который получает ЭЭГ сигнал с единственного сухого датчика, расположенного над левой лобной долей мозга.
Форм-фактор используемого нейрокомпьютерного интерфейса и неинвазивный электрод позволяют говорить об удобстве использования данного устройства для повседневных задач управления устройствами и компьютерными системами.
Краткий анализ предыдущих исследований
В последние годы идея использования сигналов головного мозга для управления различными устройствами привлекла внимание многих исследователей. Так, например, несколько групп ученых в своих работах анализировали возможность использования нейрокомпьютерного интерфейса Emotiv Epoc для управления роботизированной рукой [5, 9].
Другие исследователи изучали возможности управления объектами в виртуальной среде (например, в видеоиграх [6]) и устройствами, такими как радиоуправляемые вертолеты [2], с применением клинических ЭЭГ систем. Также аналогичные исследования касались применения мозговых сигналов для управления элементами графического интерфейса в компьютерных системах.
Группа ученых под руководством Фабиани исследовала применение нейрокомпьютерного интерфейса для управления движением курсора в двух измерениях [4], а группа американских ученых предприняла попытку создания системы управления интерфейсом смартфона Apple iPhone с помощью нейрокомпьютерного интерфейса Emotiv Epoc [3]. В большинстве указанных выше работ и аналогичных им для преобразования сигналов головного мозга в управляющее воздействие для устройства или объекта компьютерной системы используется подход на основе детектирования вызванного потенциала P300. Подробнее о данном подходе и его применении при использовании нейрокомпьютерного интерфейса Emotiv Epoc можно узнать из данной статьи [1]. Данный подход требует использования нейрокомпьютерного интерфейса как минимум с тремя электродами, поэтому в нашем исследовании он оказался не применим.
Мобильный робот Orbotix Sphero — это шарообразное устройство, способное двигаться в заданном направлении с помощью встроенного мотора, а Вращаться вокруг своей оси. Этот робот оборудован беспроводным интерфейсом Bluetooth, который позволяет отправлять команды с внешних устройств. Для управления скоростью передвижения мобильного робота предлагаем использовать уровень концентрации оператора, а для поворота на 90 градусов — уровень его расслабленности. Оба этих уровня рассчитываются при помощи нейрокомпьютерного интерфейса NeuroSky MindWave Mobile на основе данных активности альфа- и бета-ритмов мозга. Альфа-волны (8–12 Гц) доминируют в ЭЭГ в состоянии расслабления, тогда как бета-волны (13–30 Гц) преобладают при концентрации внимания на решении мыслительных задач [7, 8].
Общая схема экспериментальной системы управления мобильным роботом представлена на Рис. 2.

Рис. 2. Общая схема экспериментальной системы управления мобильным роботом
Характеристики нейрокомпьютерного интерфейса NeuroSky MindWave Mobile
Нейрокомпьютерный интерфейс NeuroSky MindWave Mobile включает в себя один сенсор для считывания мозговых сигналов и одну дополнительную датаприемную точку. Типы датчиков: пассивные, сухие. В процессе работы нейрокомпьютерный интерфейс улавливает электрические сигналы не только от мозга, но и от мышц, которые имеют большую амплитуду, следовательно, их необходимо фильтровать.
Для этого считывается дополнительный сигнал оттуда, где есть сигналы от мышц, но нет сигналов от мозга — это точки в височной области или районе ушей (для NeuroSky MindWave Mobile это мочка левого уха). Схема расположения датчиков на голове изображена на Рис. 3.

Рис. 3. Схема расположения датчика NeuroSky MindWave Mobile охватывает область Frontal Polar 1 (Fp1), в то время как дополнительная опорная точка размещена в зоне A1.
Зафиксированные нейрокомпьютерным интерфейсом данные сигналов головного мозга передаются по беспроводному Bluetooth каналу на компьютер, который по определенному алгоритму обрабатывает полученные сигналы и преобразует их в управляющие сигналы для мобильного робота.
Для оценки уровня расслабления и концентрации оператора, контролирующего мобильный робот, на основе альфа- и бета-ритмов соответственно был применён следующий алгоритм:
1) К исходному ЭЭГ сигналу применяется быстрое преобразование Фурье в соответствии с формулами:

(1)
где X является вектором зафиксированных необработанных ЭЭГ сигналов за последние 2 секунды, Y — спектральной мощностью X, вычисленной с помощью быстрого преобразования Фурье. Yn показывает амплитуду волн n-ой частоты.
2) Расчитывается среднее значение амплитуды мозговых волн в определенных диапазонах частот согласно следующим формулам:

(2)
Среднее значение амплитуды мозговых волн в альфа-диапазоне Pα определяется усреднением значений Y в диапазоне от 8 до 12 Гц. Среднее значение амплитуды в бета-диапазоне Pβ получается путём усреднения значений Y в диапазоне от 13 до 30 Гц.
3) Полученное среднее значение для альфа- и бета-волн нормализуется в соответствии с формулой (3) в диапазоне от 0 до 100.

(3)
4) Полученное нормализованное значение для альфа-волн принимается в качестве показателя расслабления пользователя, полученное нормализованное значение для бета-волн принимается в качестве показателя концентрации пользователя.
Чтобы запустить движение мобильного робота в текущем направлении, оператору с одетым нейрокомпьютерным интерфейсом нужно удерживать уровень концентрации выше установленного порога (в данном эксперименте данный порог составляет 50 для показателей концентрации и расслабления) по меньшей мере 3 секунды. Для того, чтобы инициировать поворот мобильного робота на 90 градусов, требуется поддерживать уровень расслабленности выше порогового значения также не менее 3 секунд. Если оператор соблюдает указанные условия по уровню концентрации или расслабления, компьютер передает управляющие сигналы мобильному роботу Sphero через беспроводной Bluetooth канал.
На графике ниже (Рис. 4) указаны примеры описанных управляющих сигналов, которые отдавались мобильному роботу в процессе эксперимента.

Рис. 4. График управляющих сигналов
Результаты и выводы
Результаты проведенного исследования позволяют утверждать, что нейрокомпьютерный интерфейс NeuroSky MindWave Mobile способен выявлять действующие сигналы мозга. Дальнейшая обработка этих сигналов создает определённый набор управляющих команд, которые можно использовать для управления как физическими удаленными устройствами, так и объектами в виртуальной реальности. Тем не менее, из-за технических ограничений, связанных с небольшим количеством электродов в интерфейсе NeuroSky MindWave Mobile, набор управляющих сигналов оказывается ограниченным, хотя и достаточно для управления простыми устройствами.
Аппараты бесконтактного измерения сигналов головного мозга

В настоящее время существует множество достижений в области бесконтактного измерения мозговых сигналов. Разрабатываются методы магнитографического исследования мозга, использующие сверхпроводники при низких температурах около -200°C. Также разработаны подходы к бесконтактному снятию низкоамлитудных электромагнитных сигналов, содержащих ЭЭГ, с использованием сверхчувствительных сенсоров или антенн.
Ярким примером устройства, снимающего ЭЭГ бесконтактным методом, посредством измерения ЭМИ (электромагнитных импульсов) головного мозга, будет являться инновационное устройство — электроэнцефалограф с бесконтактными датчиками снятия ЭЭГ, созданного сотрудниками Калифорнийского университета в Сан-Диего (США) [4]. Сотрудники этого университета создали медицинский датчик, который может считывать информацию для электрокардиограммы или электроэнцефалограммы через одежду, без контакта с кожей и без специальных гелей и прокладок.
Рис.8. Бесконтактный датчик для определения ЭЭГ и ЭКГ. В настоящих датчиках, фиксирующих изменения в полярности в теле человека, требуется контакт с кожей и использование гелевых прокладок, которые могут влиять на уровень импеданса. С другой стороны, «сухие» датчики могут быть не совсем удобны и имеют высокую чувствительность к внешним движениям.
Отказавшись от электродов, американские исследователи создали ёмкостный датчик, который проводит более слабые сигналы, но делает это на небольшом расстоянии. Идея не нова, но попытки разработки таких устройств оставались непрактичными для массового производства – либо слишком дорогими, либо чересчур чувствительными к внешним шумам.
Созданный биоинженером из Калифорнийского университета и его аспирантом датчик избавляет от этих недостатков. Предполагается, что это прототип, тем не менее, он является наглядным примером того, как можно без значительных недостатков, таких как неудобные резинки и гели, регистрировать ЭЭГ. Однако даже учитывая этот прототип, становится очевидным, что на сегодняшний день отсутствуют устройства, способные без контакта так же точно фиксировать ЭЭГ, как традиционные электроэнцефалографы с контактными электродами. Это объясняется несколькими факторами: использование дорогих датчиков для измерений, высокий уровень шумов на фоне полезных сигналов и потребность в схемах и материалах, устойчивых к внешним помехам. Главным из них является высокий уровень шумов и недостаток отлаженной технологии для регистрации УНЧ сигналов.
Основными недостатками любой энцефалаграфической системы является ее методы снятия потенциалов. Неудобства, которые испытывают пациенты это один из больших минусов работы этого устройства. Методы снятия потенциалов головного мозга с помощью электродов сталкиваются со многими проблемами в виде дополнительных плавающих сопротивлений гелиевых растворов и прокладок.
Наряду с этим, неточности могут возникать из-за взаимных наводок от соседних измерительных каналов и сенсоров. Для устранения указанных проблем предлагается система бесконтактного считывания и регистрации сигналов, испускаемых головным мозгом. Цель данной системы заключается в считывании ритмов головного мозга (далее РГМ) и их обработке без непосредственного контакта сенсоров с головой человека.
Как работают датчики для считывания сигналов головного мозга
Интерфейсы «мозг-компьютер» обычно используют электроды, которые устанавливаются на коже головы или даже имплантируются в мозг. Исследователи из китайского университета Цинхуа создали неинвазивное устройство для считывания мозговой активности, получившее название SpiralE. Этот компактный прибор помещается в ушной канал пациента и представляет собой тонкую ленту, состоящую из нескольких слоев. Устройство фиксирует электрические сигналы мозга с точностью до 95%.
Самые интересные технологические и научные новости выходят в нашем телеграм-канале Хайтек+. Подпишитесь, чтобы быть в курсе.
Размер SpiralE составляет всего 50 мм в длину и 3 мм в ширину. Устройство состоит из тонкой полоски, в которой имеются два слоя полимера с памятью формы, один слой для электротермального активирования и один слой, предназначенный для снятия электроэнцефалограммы. Полоска имеет спиралевидную форму, напоминающую пружину, что значительно облегчает ее введение в ушной канал.
После установки устройства оно подвергается воздействию внешнего электрического поля, что запускает процесс нагревания слоя электротермальной активации. Вырабатываемое тепло заставляет полимеры полосы с памятью формы пытаться вернуться в плоское, нескрученное состояние. В результате этого полоска начинает развертываться, датчик плотно соприкасается с кожей, а его слой электроэнцефалограммы аккуратно регистрирует электрические сигналы мозга.
SpiralE подстраивается под индивидуальную форму ушного канала каждого пациента. При этом устройство не блокирует звуковые волны и не влияет на слух. Его легко извлечь — достаточно аккуратно вытянуть, слегка поворачивая.
Лабораторные испытания показали, что устройство удобно носить даже продолжительное время, и оно считывает активность мозга добровольцев с точностью до 95%. Ученые надеются, что прибор можно будет использовать в выявлении эпилепсии или при мониторинге характера сна пациентов. Спать с крошечным прибором внутри уха куда приятнее, чем с современными наголовными датчиками.
Тан Ли: Шлем для считывания мозговых волн
Тан Ли представляет впечатляющий интерфейс, позволяющий пользователю управлять виртуальными объектами и даже физической электроникой лишь с помощью мыслей (и небольшого уровня концентрации). Презентуя шлем, она акцентирует внимание на его широком спектре возможных применений.
Вплоть до недавнего времени общение человека с машиной ограничивалось сознательными и непосредственными формами. Будь то нечто простое, скажем, включение освещения с помощью переключателя, или такая сложная вещь, как программирование роботов, машине всегда надо давать команду, а то и серию команд, прежде чем она что-то выполнит для человека.
Тем не менее, человеческое общение намного сложнее и интереснее, так как в процессе учитывается гораздо больше факторов, которые не всегда выражены явно. Собеседник при этом обращает внимание на выражение лица, жесты и движения, может активно воспринимать чувства и эмоции другого человека через диалог. Исходя из этого, человек формирует большую часть своих решений. Мы поставили задачу перенести набор межличностного общения в взаимодействие человека с машиной, чтобы компьютеры смогли не только понимать наши прямые команды, но и реагировать на мимику и эмоциональное состояние. Для этого наилучшим образом подходит интерпретация сигналов, которые естественным образом возникают в мозге, как в центре управления и ощущения.
Идея, казалось бы, прекрасная, но эта задача, как сказал в своем вводном слове Бруно, не из легких по двум основным причинам. Первая проблема – алгоритмы распознавания. Наш мозг состоит из миллиардов активных нейронов, с суммарной длиной всех аксонов примерно в 170 тысяч километров.
Во время взаимодействия нейронов химические реакции выделяют электрические импульсы, которые можно измерять. В основном функциональная область мозга находится на внешней поверхности его коры. Для увеличения площади, пригодной для умственных процессов, поверхность мозга имеет множество извивов.
Эти складки коры представляют собой значительное препятствие для интерпретации поверхностных электрических импульсов. У каждого человека кора мозга сложена своим собственным узором – подобно ситуации с индивидуальными отпечатками пальцев. Сигнал может поступать из той же функциональной части мозга, но к тому времени, когда структура мозга уже сложилась, физическое расположение этой части может оказаться в разных местах у разных индивидуумов, даже у однояйцовых близнецов, и среди поверхностных сигналов уже не наблюдается четкого соответствия.
Наш успех был достигнут благодаря созданию алгоритма, который «разворачивает» извивы коры, что позволяет более точно определить источники сигналов и делает устройство пригодным для работы с широкой аудиторией. Вторая задача заключается в разработке конкретного устройства для наблюдения за мозговыми волнами.
Обычно при замерах ЭЭГ вокруг головы сплетают целую сеточку из сенсоров, примерно как на этой фотографии. Технический работник прикладывает электроды к поверхности головы с помощью проводящего геля или клейкого материала, при этом в качестве подготовки к процедуре обычно надо слегка подстричь голову. Процесс занимает немалое время, и он не из самых приятных. Кроме того, такая система обходится в несколько десятков тысяч долларов.
Сейчас я хочу пригласить на сцену Эвана Гранта, который выступал на нашем мероприятии в прошлом году и согласился помочь мне в демонстрации нашей разработки.
Перед вами устройство с 14-канальной системой высокоточного приема ЭЭГ. Оно не требует ни подготовки волосяного покрова, ни проводящего геля или клейкого материала. Нужно всего несколько минут, чтобы включить его и установить настройку сигналов. Устройство беспроводное, что дает свободу передвижения.
Сравнивая стоимость традиционных систем ЭЭГ, достигающих десятков тысяч долларов, этот шлем обойдется всего в несколько сотен. Перейдем к алгоритмам распознавания. Касаясь выражений лиц, стало понятно, что их можно идентифицировать практически сразу, сделав тонкую подстройку под индивидуальные особенности. Однако, учитывая ограниченное время нашего выступления, я бы хотела продемонстрировать когнитивный пакет, который позволяет манипулировать виртуальными объектами только с помощью силы мысли.
Эван с этой системой не работал, поэтому для него надо сначала создать своей профиль. «Джоанна» из списка, очевидно, не подходит, и мы добавим пользователя «Эван». Прекрасно. В когнитивном пакете первым долгом необходимо начать с тренинга нейтрального сигнала. «Нейтральный» означает, что Эвану ничего особенного делать не надо – просто расслабиться, погулять.
Суть заключается в установлении базовых параметров нормального состояния мозга, поскольку каждый мозг уникален. Прибор сделает это за восемь секунд. После этого мы будем выбирать действие из списка, основываясь на движении. Итак, Эван, выбери что-нибудь, что ты можешь очень ясно визуализировать.
Эван Грант: Скажем, «притягивание».
Тан Ли: Хорошо, давайте выберем «привлечение». Идея заключается в том, что сейчас Эван должен представить, как объект приближается на экране. Индикатор на экране будет показывать выполнение операции. В первый раз ничего не произойдет, поскольку система не знает, как он воспринимает «привлечение». Прошу сосредоточенно думать об этом в течение всех восьми секунд.
Итак, приготовились – поехали! Отлично. При выборе утвердительного ответа кубик оживет. Теперь посмотрим, действительно ли Эван может представить себе притягивание. О! Молодчина!
Это просто потрясающе!
У нас есть немного времени, поэтому я попрошу Эвана сделать трудное задание. Трудно оно потому, что требуется визуально представить себе нечто, отсутствующее в нашем физическом мире. А именно, «исчезновение». Дело в том, что основанные на движении действия мы выполняем постоянно, и визуализировать их не сложно. Но для «исчезновения» аналогов нет.
Итак, Эван, теперь тебе нужно визуализировать, как кубик постепенно исчезает. Начинаем с того же тренинга. Готовы? Вперед! Начинаем.
Боже мой!
У него это здорово получается! Давайте попробуем еще раз.
ЭГ: Не могу сосредоточиться.
ТЛ: В любом случае, эта штуковина работает, даже если нам удалось сделать это лишь на миг. Как я уже отметила, довольно сложно моментально представить такое. Примечательно, что мы предоставили программе только один пример того, как он видит «исчезновение». Поскольку здесь используется алгоритм машинного обучения…
Спасибо, Эван, ты просто великолепно продемонстрировал эту технику.
Как вы уже могли заметить, наша программа функционирует на основе принципа сопоставления с нормальными значениями. По мере привыкания Эвана, или любого другого пользователя, к системе, появляется возможность интегрировать дополнительные элементы распознавания, что позволит системе дифференцировать отдельные мысли. После завершения этапа распознавания каждую мысль можно будет выводить на любых вычислительных устройствах, приложениях или платформах.
Я покажу вам лишь пару примеров, но потенциал приложений этого нового интерфейса велик. Скажем, в играх и в виртуальном мире выражения лица можно естественно и интуитивно использовать для управления аватаром или виртуальным персонажем. Ясно, что с фантастикой и чудом можно делать опыты и управлять миром посредством мозга.
Кроме того, цветовая гамма, освещение, звуковые эффекты и многие другие параметры могут адаптироваться в зависимости от эмоционального состояния, усиливая восприятие в режиме реального времени. Теперь рассмотрим разработки, созданные учеными и инженерами со всей планеты, используя роботов и простые механизмы. В нашем примере это игрушечный вертолет, который поднимается по команде мысли «поднимись».
Технологию можно применить также и в реальном мире: в данном примере в так называемом «интеллектуальном доме». Из системы пользовательского интерфейса поступают команды открыть гардины или закрыть гардины. Конечно же, освещение можно включить или выключить. И, наконец, приложения с потенциалом изменить образ жизни. К примеру, управление электрической коляской.
В этом контексте каждое изменение мимики соответствует конкретной команде.
Голос: Подмигиваем правой стороной, чтобы повернуть направо. Подмигиваем левой стороной и вновь разворачиваемся налево. Улыбаемся, чтобы двигаться вперед.
Это лишь начало раскрытия потенциала современных технологий. Мы надеемся, что сообществу удастся привлечь исследователей и разработчиков со всего мира, которые смогут способствовать развитию этой технологии.
Нейроинтерфейс: посредник между мозгом и компьютером
Нейроинтерфейс (или интерфейс «мозг – компьютер») – так называется устройство для обмена информацией между мозгом и внешним устройством. В качестве объекта управления может выступать не только компьютер, но и любое другое электронное устройство: квадрокоптер, система «умного дома», промышленный робот или боевой дрон, экзоскелет и даже искусственные органы чувств.
На текущий момент медицина остается главной сферой применения нейроинтерфейсов. Здесь интерфейс «мозг – компьютер» открывает новые горизонты в области протезирования и реабилитации людей с различными моторными нарушениями. Например, после инсульта многие пациенты теряют способность к речи. В таких случаях нейроинтерфейс может служить умным связующим звеном между мозгом и окружающим миром, становясь единственным средством для общения.
Парализованные пациенты с помощью такого устройства могут управлять протезом и инвалидной коляской или даже механическим экзоскелетом. Пожалуй, самое лучшее наглядное доказательство фантастических возможностей этой технологии произошло в 2014 году. Тогда Чемпионат мира по футболу в Бразилии открыл ударом по мячу Джулиано Пинто – человек с параличом нижних конечностей. Сделал он это с помощью экзоскелета, управляемого силой мысли.
Нейроинтерфейсы активно проникают в повседневную жизнь и находятся на пути к расширению своих возможностей. В настоящее время интерес к технологии «мозг – компьютер» проявляют не только медицинские учреждения, но и индустрия развлечений с ее компьютерными «игрушками», промышленное производство, системы «умного дома» и робототехника.
Согласно исследованию Allied Market Research, рынок интерфейсов «мозг – компьютер» растет опережающими темпами и уже в 2020 году составит порядка 1,46 млрд долларов.
История отношений «мозг – компьютер»
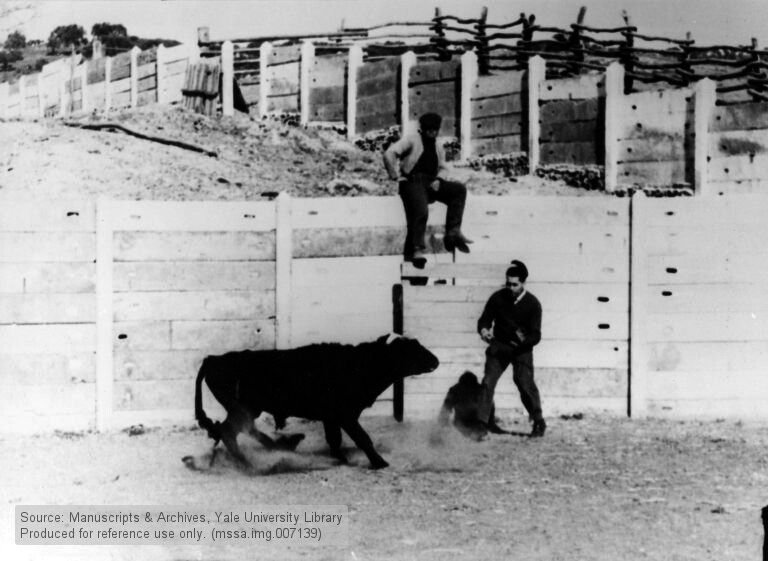
История интерфейса «мозг – компьютер» насчитывает более ста лет. Еще в 1875 году английский физиолог и хирург Ричард Кэтон зафиксировал электрические сигналы на поверхности мозга животного, предвосхитив будущие достижения. В 50-х годах XX века появился первый нейроинтерфейс.
Им принято считать Stimoceiver – электродное устройство, которое управлялось по беспроводной сети с помощью FM-радио. Оно было изобретено испанским и американским ученым Хосе Дельгадо и испытано в мозге быка. Демонстрация возможностей нового устройства была очень эффектной – на арене для корриды. Дельгадо вышел против быка, а когда тот побежал на него, нажал кнопку на пульте управления – впервые удалось изменить направление движения животного с помощью нейроинтерфейса.
В 1998 году в мозг человека был внедрен первый нейроинтерфейс. Им стал американский художник и музыкант Джонни Рэй, который, представляя движения рук, управлял курсором на экране компьютера.
Но настоящий прорыв случился несколько лет назад, когда появились достаточно мощные компьютеры и новые алгоритмы. Если раньше можно было расшифровывать только самые простые намерения, например, хочет человек пошевелить правой рукой или левой, то современный нейроинтерфейс может управлять даже отдельными пальцами протеза руки. Для этого нужно внедрить на участке мозга, отвечающем за движение рук, более 100 электродов.
Для чего нужны нейродатчики
Нейродатчики не способны читать мысли и, в ближайшее время, не смогут этого сделать. Тем не менее, они уже обладают значительными возможностями и постепенно входят в нашу жизнь. Важно понимать их реальный потенциал и как можно использовать их безопасно.
Чаще всего нейродатчики выступают элементом нейроинтерфейса, или интерфейса «мозг — компьютер». Такой интерфейс предполагает взаимодействие между человеческим мозгом и компьютером без использования промежуточных звеньев, например пальцев и клавиатуры.
Изначально нейроинтерфейсы рассматривали главным образом как средство реабилитации, например, после инсульта, когда движение конечностей невозможно. Но в настоящее время спектр применения этих технологий значительно расширился:
- Общение для людей с ограниченными возможностями. Например, человек с поздней стадией бокового амиотрофического склероза, который не может управлять телом, может с помощью нейроинтерфейса набирать текст на компьютере.
- Восстановление неврологических функций. Нейроинтерфейсы в сочетании с виртуальной реальностью помогают восстанавливать моторные функции после инсульта. Например, человек пытается подвигать ногой, но не может этого сделать. Нейродатчик фиксирует сигнал мозга о попытке, и в виртуальной реальности ногой начинает двигаться. Это создает эффект положительной обратной связи, в результате чего человек видит, как его желание двинуть ногу привело к реальному результату, что в конечном итоге способствует восстановлению функции.
- Нейроинтерфейсы для управления протезами. Традиционные протезы управляются с помощью сигналов от сохранившихся мышц, что иногда оказывается недостаточно для полноценного движения. Управление протезом через сигналы мозга позволит добиться большей точности.
- Мониторинг эпилепсии. В этом случае нейроинтерфейс не только фиксирует сигналы мозга, указывающие на приближающийся приступ, но также может воздействовать, чтобы остановить его.
- Увеличение производительности и безопасности на рабочем месте. В некоторых профессиях, таких как авиадиспетчеры или водители грузовиков, уровень концентрации и бодрствования критически важен. Нейродатчики способны отслеживать, не засыпает ли работник или не теряет ли фокус.
Это только несколько основных направлений развития нейроинтерфейса. Кроме того, данные нейродатчиков активно используют нейробиологи для изучения человеческого мозга.
Как развивается нейроинтерфейс
Развитие нейроинтерфейсов опирается на несколько направлений:
- Создание чувствительных сенсоров, которые будут улавливать только необходимые сигналы и минимизировать «шум»;
- Способность интерпретировать электрические сигналы мозга;
- Разработка программного обеспечения для обработки полученной информации.
Благодаря развитию всех этих направлений в последнее десятилетие создаются те самые портативные устройства: гарнитуры, наушники и даже маски для сна. Например, необходимым шагом к этому стало создание сухих датчиков для электроэнцефалограммы. В отличие от влажных для них не нужно очищать кожу и использовать специальный гель. Соответственно, такие датчики уже можно использовать в портативных устройствах.

Способности расшифровывать сигналы мозга постоянно улучшаются. Хотя ученые еще не научились читать мысли — и в обозримом будущем вряд ли это произойдет, они могут определить, что человек на грани засыпания или находится в состоянии глубокого сосредоточения. Исследования показывают, что уже возможно определить, чем именно занимается человек. Например, в одном исследовании специалисты использовали данные ЭЭГ для регистрации того, смотрит ли испытуемый сейчас на изображение.
Ничего не утаишь: как работает прибор для чтения мыслей человека
Ученые из Техасского университета в Остине представили неинвазивный декодер активности мозга, который можно использовать для чтения мыслей человека. О том, как это работает, рассказывает научный обозреватель Николай Гринько.

В повести советского автора Кира Булычева «Сто лет тому вперед» описывается миелофон — научный прибор, позволяющий читать мысли. Автор представил его как компактный аппарат с проводными наушниками, через которые исследователь мог слышать мысли других людей, животных и даже роботов. Дальность действия прибора составляла до 10 метров, а для работы требовалось, чтобы в мозге собеседника были мысли.
В 1985 году повесть экранизировали, сняв фильм «Гостья из будущего». Но реквизиторы киностудии не стали конструировать миелофон по описанию Булычева, а вместо этого взяли кристалл кварца в коробочке, купленный в сувенирном магазине. Как мы видим, ни писатель, ни авторы фильма даже близко не представляли себе, как на самом деле может выглядеть такой прибор.
Спустя почти 40 лет ученые создали устройство для чтения мыслей. Оно состоит из МРТ-сканера и мощного компьютера — совершенно не сравнимо ни с устройством фантаста, ни с киношными образами. Таким образом, московские школьники не смогли бы просто так носить его с собой, спасаясь от космических пиратов.
Исследователи из Техасского университета Алекс Хут, Аманда Лебел, Шейли Джейн и Джерри Танг сконструировали систему, которую назвали «семантическим декодером». Она может считывать мозговую активность во время прослушивания рассказа или просмотра картинок и преобразовывать ее в текст. Главное, для этого не приходится вживлять в мозг никаких имплантатов. Считывание производится неинвазивно с помощью технологии МРТ, затем данные со сканера поступают в нейросеть, генерирующую текст.
Сначала разработчики обучили систему: человек, помещенный в МРТ, несколько часов слушал, как диктор читает различные произведения, стихи и статьи, загруженные в нейросеть. Алгоритм отслеживал этот процесс и сопоставлял изображения активности мозга с полученными данными. После этого участнику эксперимента показали текст, который до этого момента ему не был известен, а нейросеть попыталась угадать, о чем идет речь, основываясь на МРТ-снимках его мозга.
Конечно, дословной расшифровки не получилось. Но смысл текстов, которые выдавала система, был удивительно близок к тем, которые прослушивал участник эксперимента. Например, когда в рассказе встретилась фраза: «У меня еще нет водительских прав» , компьютер интерпретировал ее так: «Я еще даже не начал учиться вождению» . Когда испытуемый слышал слова: «Я не знал, кричать, плакать или убегать. Вместо этого я сказал: «Оставь меня в покое!» , компьютер прочитал его мысли следующим образом: «Он начал кричать и плакать, а потом попросил оставить его в покое» .
Интересно, что если человек слушал сразу две истории, но фокусировался на одной, аппарат распознавал именно эту. Если же испытуемому показывали видеоролик без звука, система генерировала текст, который довольно точно описывал происходящее на экране.
Все это, несомненно, крайне впечатляет, хотя в работе «аппарата для чтения мыслей» есть и свои особенности.
Во-первых, система требует предварительного обучения именно на мозговой активности того человека, с которым она будет работать. Во-вторых, ее легко обмануть: если испытуемый во время эксперимента отвлекается или думает о чем-то другом, система сбивается и предоставляет неверные результаты.
Тем не менее итоги тестов можно считать прорывными: выяснилось, что человеческие мысли действительно можно читать . Причем для этого вовсе не обязательно вживлять в мозг какие бы то ни было имплантаты. Несомненно, технология будет совершенствоваться и со временем ученые наверняка сконструируют миелофон в виде коробочки с наушниками или сверкающего кристалла.
Опыт других людей
Алексей, 30 лет, инженер:
Я всегда интересовался нейронаукой, и когда я узнал о датчиках для считывания сигналов головного мозга, это стало для меня настоящим открытием. В своей работе я сталкивался с многообразными электроникой, и в один из дней я решил подробнее изучить, как работают эти устройства. Датчики, которые используют электроэнцефалографию (ЭЭГ), фиксируют электрическую активность нейронов. Каждый сигнал, который они получают, отображает определенные волны мозга, такие как альфа, бета и дельта. Мне было интересно понять, как это можно применять, например, для управления протезами или в нейрокомпьютерных интерфейсах. Я всегда мечтал создать что-то, что поможет людям с ограниченными возможностями.
Анна, 26 лет, психолог:
В своей практике я часто использую нейрофизиологические методы, чтобы понять, как работают эмоциональные системы человека. Я начала изучать датчики для считывания сигналов мозга, когда готовила семинар для клиентов о том, как эмоции влияют на физическое состояние. Для меня стало важно знать, что такие датчики, как функциональная магнитно-резонансная томография (фМРТ) и ЭЭГ, могут отображать уровень стресса и активности различных участков мозга. Я была поражена возможностями применения этих технологий в психологии: например, мы можем объяснить клиентам, как технологии могут помочь им лучше понимать свои реакции и улучшать эмоциональное состояние.
Владимир, 40 лет, IT-специалист:
Я работаю в области разработки приложений и всегда интересовался, как можно интегрировать новые технологии в уже существующие продукты. Когда я узнал о датчиках для считывания сигналов мозга, понял, что это может открыть множество новых направлений в разработке. Я начал исследовать различные типы датчиков, включая ЭЭГ и нейроинтерфейсы. Они работают, считывая электрические импульсы, которые происходят при нейронной активности. Представьте, что вы можете управлять своим телефоном или компьютером просто силой мысли! Это звучит как научная фантастика, но на самом деле это уже на пороге реальности, и я хотел бы быть частью этого процесса. В будущем планирую разработать приложение, которое может помочь людям контролировать стресс и улучшать концентрацию.
Вопросы по теме
Какова роль электродов в работе датчиков для считывания сигналов головного мозга?
Электроды играют ключевую роль в функционировании датчиков, работающих с сигналами головного мозга. Они предназначены для регистрации электрической активности нейронов, которая возникает при их коммуникации. Существуют разные типы электродов: инвазивные, которые имплантируются непосредственно в мозг, и неинвазивные, которые размещаются на поверхности кожи головы. Инвазивные электроды обеспечивают высокую точность сигналов, тогда как неинвазивные методы проще в использовании и менее рискованны, но могут иметь ограничения в разрешении.
Как современные технологии улучшают разрешение датчиков для считывания мозговых сигналов?
Современные технологии, такие как миниатюризация сенсоров, разработка новых материалов для электродов и алгоритмов обработки сигналов, значительно повышают разрешение датчиков. Например, использование нанотехнологий позволяет создавать более чувствительные электроды, которые способны улавливать даже минимальные изменения в электрической активности. Кроме того, алгоритмы машинного обучения помогают анализировать большие объемы данных, выявляя закономерности и улучшая точность интерпретации сигналов.
Какие потенциальные применения датчиков для считывания сигналов головного мозга можно ожидать в будущем?
Будущее применения датчиков для считывания сигналов головного мозга весьма многообещающе. Ожидается, что они смогут использоваться не только в медицинской диагностике и лечении неврологических заболеваний, но и в таких областях, как интерфейсы «мозг-компьютер», которые позволят людям управлять устройствами с помощью мыслей. Также возможны применения в сферах, связанных с улучшением когнитивных навыков, виртуальной реальностью и даже в образовании, где датчики могут использоваться для мониторинга уровня внимания и понимания учебного материала.



